So it is possible to depict dynamic phenomena using static visual stimuli. Nevertheless, it appears most logical to use dynamic visual stimuli to do so. As early as 1959, Thrower pointed out that cartographers should adapt to the growing possibilities of audio-visual communication. Now that cheap and powerful computers are bringing multi-media to the homes, cartographers are almost forced into using the possibilities to "bring life" to their maps. Although people often think of animation as synonymous with motion, it covers all the changes that have a visual effect. It thus includes the time-varying position (motion dynamics), shape, colour, transparency, structure and texture of an object (update dynamics) and changes in lightning, camera position, orientation and focus and even changes in rendering techniques (Foley et al., 1990). The use of animation for maps, or cartographic animations has been the focus for research for a number of years now. From this research, we know that several types of cartographic animations can be distinguished.
Cartographic theorists have been researching the representation variables in animations. Bertin (1967) did not have much confidence in the usefulness of dynamic maps. He stated that the motion would dominate the graphic variables he distinguished (size, value, grain, colour hue, orientation and shape), thus disturbing the effectiveness of the cartographic message. But then again, Bertin didn't like colour much either... Contrary to Bertin's opinion, recent research has shown that visual variables can indeed be used on the individual frames of an animation in such a way that these images effectively communicate the cartographic message to the user, while the movement of the animation gives the message an extra dimension and "new energy". Furthermore, the findings of Koussoulakou & Kraak (1992) showed that using animated maps helped users grasp the contents of a message in a more effective manner compared to using traditional static maps or map series. It has become clear that the traditional visual variables do not suffice in describing the added means of expression we have in cartographic animations. To this end "new" visual variables have been introduced by DiBiase et al. (1992) and MacEachren (1994). These are called the dynamic visual variables , and they are:
-
duration
-
moment
-
frequency
-
order
-
rate of change
-
synchronisation
The figures below (from Köbben & Yaman, 1995) show examples of the application of these variables.

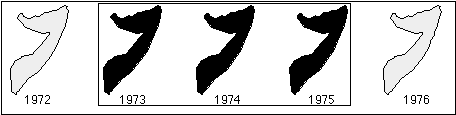
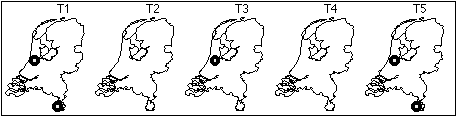



It should be noted that Blok (2005) has concluded that the last two are actually not visual variables on their own, but effects of combining one or more of the others. The dynamic visual variables can only be viewed in display time, and at least one static visual variable is required to be able to see a dynamic variable.
The reason for using dynamic visual variables is that there are many questions that are difficult to answer with static maps, whereas animations can provide answers to such user questions as:
-
when does a predicted flood reach a town?
-
in what order will towns be flooded?
-
how long does it take for the flooding to subside again?
-
how fast does the water move?
-
how often does flooding occur?
-
etcetera...
Answers to such question would be excellently suited for the heterogeneous user groups of our flood risk maps. Cartographic theory therefore seems to offer one side of a possible solution to the problems mentioned in the introduction. But we need a way of automatically generating these animated maps from existing flood risk models and data sets and also a way to deliver the generated animations to the actual users. The Geo-webservices discussed in the next section might be a way forward towards solving that problem.
Web Services are components that can be described, published, located and invoked over the Internet. They are defined as loosely coupled components that communicate via XML-based interfaces. Loosely coupled means that they are independent of computer platform and can be exchanged by similar components, e.g., when one service fails or is too busy, the system can find a similar service elsewhere on the Web. The XML-based interfaces are human readable and self-describing, which allows for automated discovery of their functionality. A simple example of such a webservice is a currency convertor, for example the one at http://www.webservicex.net. If an application (such as the demo form on this web page) is used to send a request to this service, formatted as a standardised XML message:
<FromCurrency>USD</FromCurrency> <ToCurrency>EUR</ToCurrency>
the service returns a standardised XML response:
<double>0.92635</double>
If webservices have spatial functionality, for example if they use geographic data, can output maps or find routes, we call them Geo-webservices. There are many such Geo-webservices available, the best-know proponent of it probably being Google Maps. This, and other examples such as Yahoo Maps, MSN Virtual Earth or MultiMap, can be used by anybody, as their interfaces are publicly available, but they are still proprietary in the sense that they are defined, developed and owned by commercial companies. Alternatively, Open Standards are created in an open, participatory process, where everyone interested can influence the standard. The resulting specifications are non-proprietary, that is, owned in common. That means free rights of distribution (no royalty or other fee) and a free, public, and open access to interface specifications that are also technology-neutral. There is a set of such well-defined Open Standards for Geo-webservices: the Open Web Services (OWS) of the Open Geospatial Consortium (OGC).
The OGC was founded in 1994 as a not-for-profit, international voluntary consensus standards organisation that develops Open Standards for Geospatial and location based services. Their core mission is to deliver interface specifications that are openly available for global use. The Open Web Services specifications are the basis of many high-profile projects (e.g., the European Community INSPIRE initiative).
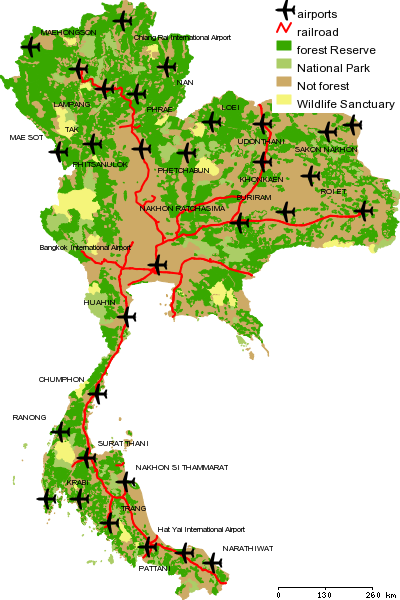
https://kartoweb.itc.nl/cgi-bin/mapserv.exe?map=D:/Inetpub/geoserver/mapserver/config.map&SERVICE=WMS &VERSION=1.1.1&REQUEST=GetMap&LAYERS=forest,railroad,airports&STYLES=&SRS=EPSG:4326&BBOX=97.35,5.61,105.64,20.47 &WIDTH=400&HEIGHT=600&FORMAT=image/png
in a web browser [try
it], the WMS at that site will return the graphic shown below.
The GetLegendGraphic request is used in a similar
fashion to get a pictorial rendering of a legend item separately. If the
user of a mapping client triggers a zoom command, the client will issue
a new GetMap request, now with a smaller BBOX. This
process will be repeated over and over again while the user interacts
with the map.
At ITC, we use Geo-webservices in teaching and consultancy. Students and staff build services and clients using a software and data stack that is employing so-called Free and Open Source Solutions for Geospatial (or FOSS4G for short). The Open Source Geospatial Foundation has been created to support and build high-quality open source geospatial software, and many softwares mentioned here are part of that effort and can be seen at the OSGEO website. Spatial data is stored in files, or can be served from spatial databases using PostgreSQL/PostGIS. The OWS services have been built using UMN Mapserver or Geoserver, or our own RIMapperWMS if we want to use SVG output (further details below). As a mapping client one can use free GIS viewers such as uDig or QantumGIS. For web-based solutions (running in any web-browsers), we use Javascript from an open source library called Open-Layers. This is a JavaScript library for displaying map data in most modern web browsers, with no server-side dependencies. OpenLayers implements a JavaScript API for building rich web-based geographic applications. One website that uses this stack is set up to show examples of how Geo-webservices can be used in bringing flood data to the stake holders. Because these stake holders are a heterogeneous user group, ranging from professionals to the general public, their access to information tools is similarly heterogeneous. In order to cater for the lowest common denominator, we set up the webservices to be usable from any web browser. The flood data itself is stored in a raster data store, using the GeoTIFF format. UMN Mapserver software is used to provide Web Map Services. We can combine the WMS providing the flood data with any other WMS for additional layers. And because of the inherent interoperability of the WMS, any other Geo-Webservice could be combined with the flood data, including proprietary ones such as Google Maps.
Although WMS implementations generally render their maps in a raster format such as PNG, GIF or JPEG, a small proportion of them also offer vector-based maps in Scalable Vector Graphics (SVG). However, these implementations all treat the output as just another graphics format, and like the raster output, the maps are basically pictures only, with no interactivity or ‘intelligence’. But SVG is more than a graphics format only, it also offers interactivity, through built-in scripting and full access to its XML DOM. It is therefore possible to build an SVG map, or rather an SVG application, that includes its own GUI, which has been demonstrated in various examples (see e.g. the Carto:Net site). These solutions have been created on a case-to-case basis however, usually as stand-alone applications, and they are not easily generated by or deployed repeatedly from a dynamic set of data. To overcome this, we developed RIMapperWMS, set up to make such a solution more generic, by offering a simple WMS conformant interface to the spatial data that outputs SVG applications. Examples of its use and a detailed description of its setup can be found in Köbben (2007) and on the RIMapper website.
The current version of RIMapperWMS (the first public beta) is fully functional as a Basic WMS 1.1.1 server. It's made available under an Open Source license and we invite anyone interested to experiment with the system, provide us with feedback or further develop the functionality. The example output below shows a map that indicates flood risk in Ward 20 of the city of Kathmandu (Nepal). On mouseover a ‘fuzzy’ risk symbol shows the underlying flood risk data.
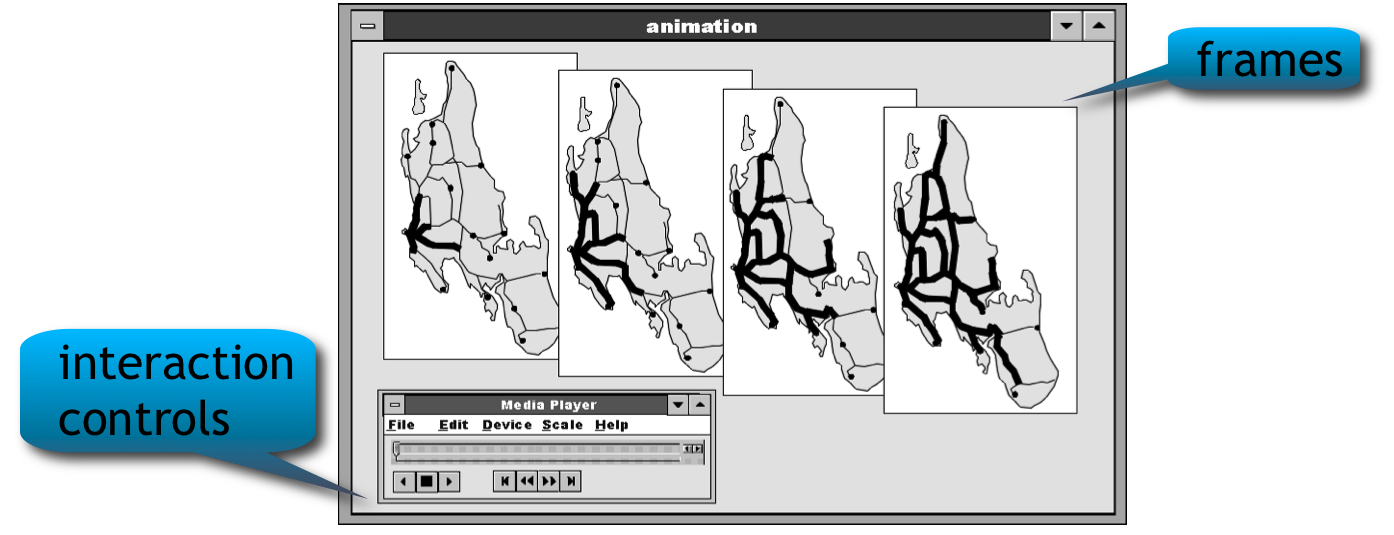
We are currently at this very preliminary conceptual stage, but an MSc student has taken up the challenge of further researching the theoretical possibilities as well as building a real proof-of-concept application. This will be an extension of the RIMapperWMS services and should be based on real use cases. We are looking into several application areas, at ITC we have e.g. data on iceberg movement in the Atlantic and extensive flood-modelling of the “Land van Maas & Waal”, a Dutch river region prone to dike-failures. There will be special attention to the animation interface, and experiment with different types of user interface for the animation control.
Bertin, J. (1967). Semiologie Graphique, Paris/Den Haag: Mouton.
Foley, J.D. et al. (1990). Computer Graphics: Principles and practice. Reading: Addison-Wesley.
Thrower, N.J.W. (1959). Animated Cartography. The professional geographer, 11 (1959) 6, pp. 9-12.